
红外热成像技术在安保机器人中的应用
文/李强 李剑 韩忠华 公安部第一研究所
骆聪聪 北京中天锋安全防护技术有限公司
随着大数据、人工智能、物联网等前沿技术的发展,越来越多的科技装备得到普及应用。安保机器人作为智能化高新科技装备,在协助民警执勤、智能安防、便民服务等方面应用显有成效,在公共安全领域中扮演重要角色。根据不同的应用场景,安保机器人按特定要求规划执行安保、巡逻任务。无论是日常的安保、巡逻任务,还是重大活动的固定点位执勤任务,其运行稳定、效用突出,但在一些特殊场景中的应用,安保机器人的性能和功能还需要不断地完善提升。其中,在雾霾、烟、雨、雪等恶劣天气、照度较低的夜间巡逻情况下,安保机器人采集的视频信息后端平台难以应用识别,如有可疑人员出现在巡逻区域,很难排除干扰得到有效告警。多数情况下巡逻执勤任务需要组织安保人员不间断进行勘察,而安保人员的主观判断往往受制于经验和生活中积累常识的影响,对巡逻区域尤其是灯光昏暗、绿植覆盖面积较大的地方易产生视觉盲点,检查时会出现客观的错误判断。
为进一步推进安保机器人的实战应用,加强其夜间、恶劣天气情况下的服役性能,切实解决安保机器人夜间巡逻对目标识别不清、异常人员未能及时发现等问题,应用红外热成像技术使其能够分辨视野范围内隐秘遮挡的可疑目标,同时将采集的图像与人体形态库中的信息进行比对,客观地反应目标是否为入侵人员并给出判断结果。
一、红外热成像技术概述
目前,红外热成像技术在人工智能、医疗、建筑、航天等众多领域地位逐渐凸显,得到国内外专家、学者以及工程技术人员重点关注。鉴于红外热成像技术在实际应用中的诸多需求,对其进行深入研究和应用具有重要的现实意义。
1.工作原理
当物体温度高于绝对值零度(-273℃)时,会持续向周围辐射出载有物体特征信息的红外线,因此识别目标物体的热力场分布与温度高低成为了红外热成像技术的关键所在,即此技术属于一种被动红外夜视技术。由于人眼的视觉范围有限,无法识别此种特征,为使目标特征更加明显,通过光电红外探测器将目标物体特征信息转化为电信号,对应的成像设备将接收到的电信号转化为物体空间温度分布。最终系统生成视频图像信号,将其直观地显示出来,即红外热成像图像(如图1所示)。
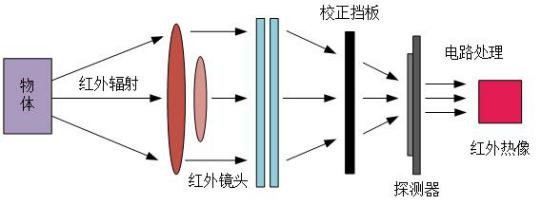
图1 红外热成像摄像机成像原理示意图
2.性能特点
单次循环识别面积广、稳定、非接触、易操作等均为红外热成像检测技术的优点所在。具体如下:
(1)可24小时全天候监控;
(2)探测能力较强,可远距离发挥效用;
(3)一种被动式的非接触式检测与识别,隐蔽性强;
(4)在恶劣环境中可同时对多目标实现高精度、远距离监控;
(5)在强光等客观条件下,物体表面的温度场图像的显示仍旧不受影响。
以上特点主要针对非制冷红外热成像设备,相较于传统红外摄像机和微光夜视技术具有明显优势。但在日常视频数据采集中,红外热成像视频的清晰度要低于可见光摄像机,且长时间运行工作会使设备温度升高,导致测量精度有所误差。
红外热成像摄像机监测对象的表面温度不因光线的变化而波动,提高夜间监控的有效性及视频监控质量是红外热成像技术应用于安保机器人的关键因素,为安保机器人能在特殊场景下应用提供有效的技术支撑和安全保障。
二、安保机器人红外热成像系统
红外热成像技术的应用很大程度上提高了安保机器人在特殊场景中的实战应用,其系统组成及技术实现方案具体如下:
1.系统组成
如图2所示,安保机器人红外热成像系统组成包括搭载红外热成像机的安保机器人、安保机器人红外热成像系统平台、无线网络通信、便携式终端设备。红外热成像机搭载在安保机器人上,连同高清摄像机共同采集安保机器人周围信息,存储在NVR设备内供后续溯源取证应用。
安保机器人红外热成像系统平台包括热成像数据汇聚、分析处理、异常信息推送。其中涉及对视频数据的智能分析,在分析算法的基础上通过预设阈值对上传数据进行分析比对,如果溢出处置,则产生异常数据预警提示,阈值范围根据需求可对算法相关部分进行调整。
无线通信为红外热成像系统平台和前端设备提供传输数据实时上传与指令下发的连接通道,数据经过无线通信网络将安保机器人采集的数据推送至安保机器人红外热成像系统平台,通过无线网络将红外热成像视频数据及异常情况推送至便携式终端,实现平台与前端、前端与接收终端的数据共享和互通。
便携式终端作为现场数据查看及报警接收设备,可对安保机器人进行实时遥控,接收安保机器人推送的红外热成像视频,发现异常情况实时显示,实现精准、快速识别及处置。

图2 安保机器人红外热成像系统架构
2.技术方案
为确保安保机器人现场采集数据实时稳定推送,以及异常情况信息实现毫秒级响应态势,对前端采集现场数据进行同时双向推送。一方面,通过无线通信网络推送至红外热成像系统平台,对采集的图像同人体形态库中的信息比对及研判;另一方面,通过无线局域网模式推送至便携式终端,用于前端安保人员调取查看。
(1)红外热成像系统技术方案
在巡逻过程中,安保机器人红外热成像系统能进行人体捕获与识别功能,包括人体的入侵报警、越界报警、遗留物报警等。其中,对于入侵报警可事先指定巡逻区域边缘位置;对于越界报警可事先指定边界的位置以及越界的方向;对于滞留报警可事先指定置留时间的阈值。
在安保机器人运动过程中,实时对红外成像视频流中出现的人体进行检测和定位,输出视频中出现的人体的位置(定位框),当人体识别报警触发,机器人停止移动,安保机器人红外热成像系统平台弹出人体识别报警弹窗,红外热成像系统平台将人体识别报警信息下发到安保机器人附近的便携式终端,安保人员收到信息后进行可疑人员确定工作。当红外热成像系统平台关闭报警,机器人会继续执行任务。后台若无人点击关闭报警对话框,报警始终不会自动停止。
采集的数据首先在本地NVR中存储,再经过安全接入模块通过无线通信网络推送至安保机器人红外热成像系统平台。一方面,利用图像数据处理软件、调用算法函数对数据参数进行比对和研判;另一方面,将输入的原始参数进行处理,抽取数据中的基本特征,如角点、边缘、纹理、线条、边界等,采用梯度类优化算法、标准粒子群算法、线性抽样等算法,对前端采集的数据进行数值演算,形成典型人体特征的机器视觉专家库,用于后期数据的分析和比对。
(2)便携式终端技术方案
如图3所示,安保机器人便携式终端警示信息接收方案一方面可接收来自红外热成像系统平台警示信息;另一方面也可直接查看安保机器人红外热成像实时视频。在安保机器人执行任务区域内可通过便携式终端实时接收监测区域内突发情况的警示信息,及时查看监测区域内实际情况,实现发生异常情况的快速响应。
当执行区域夜间巡逻任务时,突然闯入异常人员,机器人会触发预警并将异常信息反馈给便携式终端APP,弹出预警信息提示安保人员及时处理异常状况,实时保障巡逻区域的夜间安全。

图3 便携式终端流程图
三、场景应用分析
1.夜间以及恶劣气候条件下治安巡逻
安保机器人具备红外探测区域入侵功能,可实时监测指定区域内的突发情况,当某区域夜间巡逻时发现闯入异常人员,安保机器人会触发预警并将异常信息反馈给系统平台,平台弹出警示信息提示安保人员及时处理异常,实时保障巡逻区域的夜间安全。
在雨、雪、雾等恶劣气候条件下,通过可见光系统观测效果较差,无法正常工作,而红外的波长较长,穿透雨、雪、雾的能力较高,安保机器人可以通过红外热成像检测技术来克服夜间或者恶劣环境下的巡逻及监控。
2.绿化区域伪装及隐蔽目标探测识别
部分室外场景存在复杂多变的情况,增加了安保人员对该区域的管控难度,尤其是在重大活动区域周围的草丛及树林中,藏匿可疑人员现象时有发生,现场具体情况无法通过常规检测设备察觉,视觉误判会导致人为错误判断。而草木建筑等物体温度特征信息远低于人体,红外热成像系统在被动接收热辐射信号时,人体特征信息误判现象很难发生。但当灌木丛过于厚密将可疑目标完全遮挡时,应用红外热成像技术难以对可疑目标进行有效识别。
此外,红外热成像系统还能有效过滤环境背景中复杂结构、光线和物体影子等干扰,不会将上述干扰因素误判成目标,实现采用图像分析技术对巡逻区间入侵的自动报警防护,极大地提高了执勤安保机器人的安全防护效率。
3.重要部门、仓库的安保防火监控
由于红外热成像系统是反映物体温度而成像的,是通过确定视场内最高温度的方法判断是否存在异常火源。当检测到存在高温点的情况时立即触发安全报警,发出警笛报警声,同时联动后台并在后台客户端弹出火灾报警弹窗,弹窗内容包括红外热成像系统检测采集到的图片以及位置等信息,为锁定火灾位置、确认火势合理调配人力提供依据。
四、结语
红外热成像技术在安保机器人中的应用,解决了安保机器人在夜间执行巡逻执勤任务识别不清等问题,可在有限的警力条件下对发生的异常情况实现精准识别、自动预警、快速反应,提升了安保机器人的实战性能,为安保机器人在实战应用中提供有效的技术支撑和安全保障。